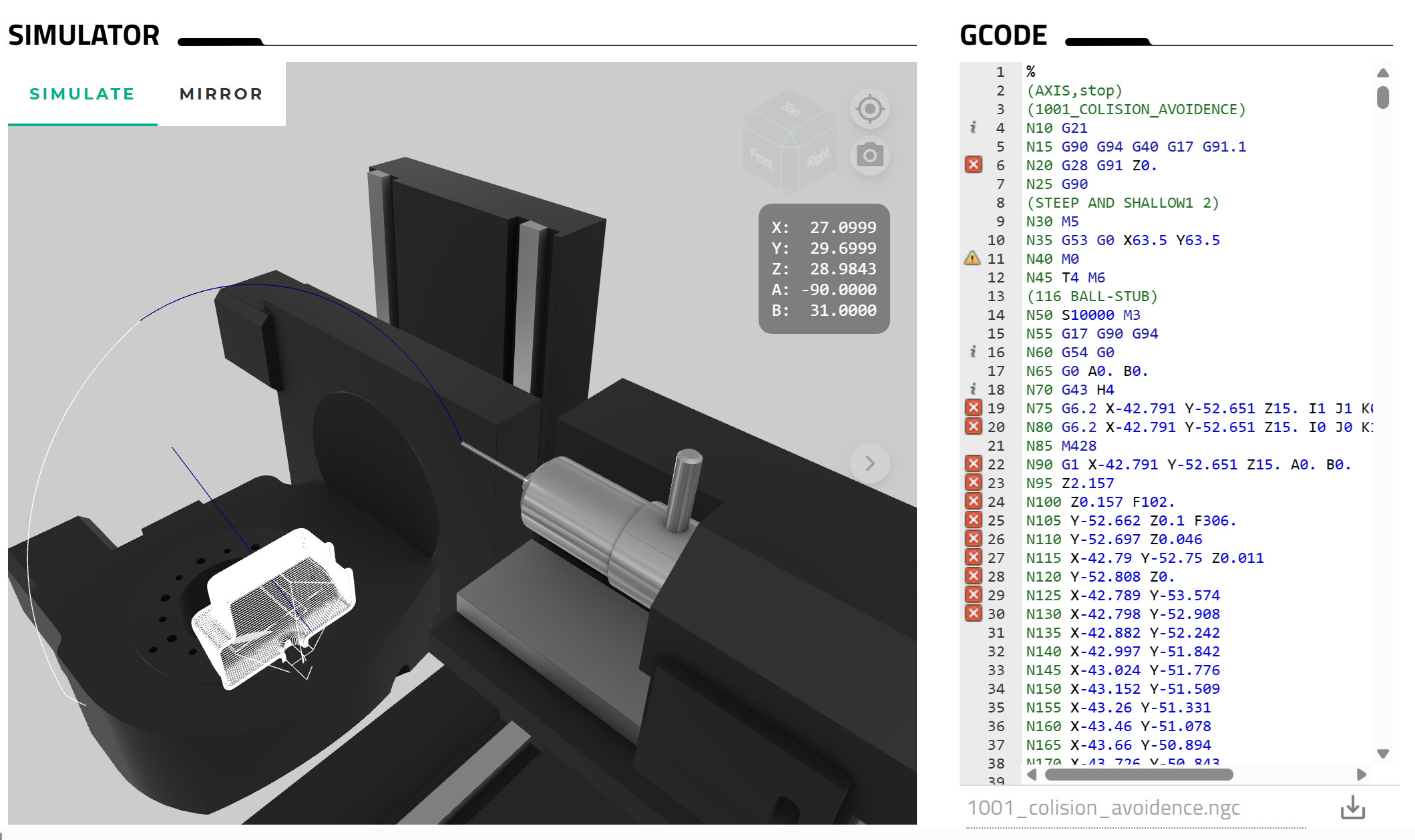
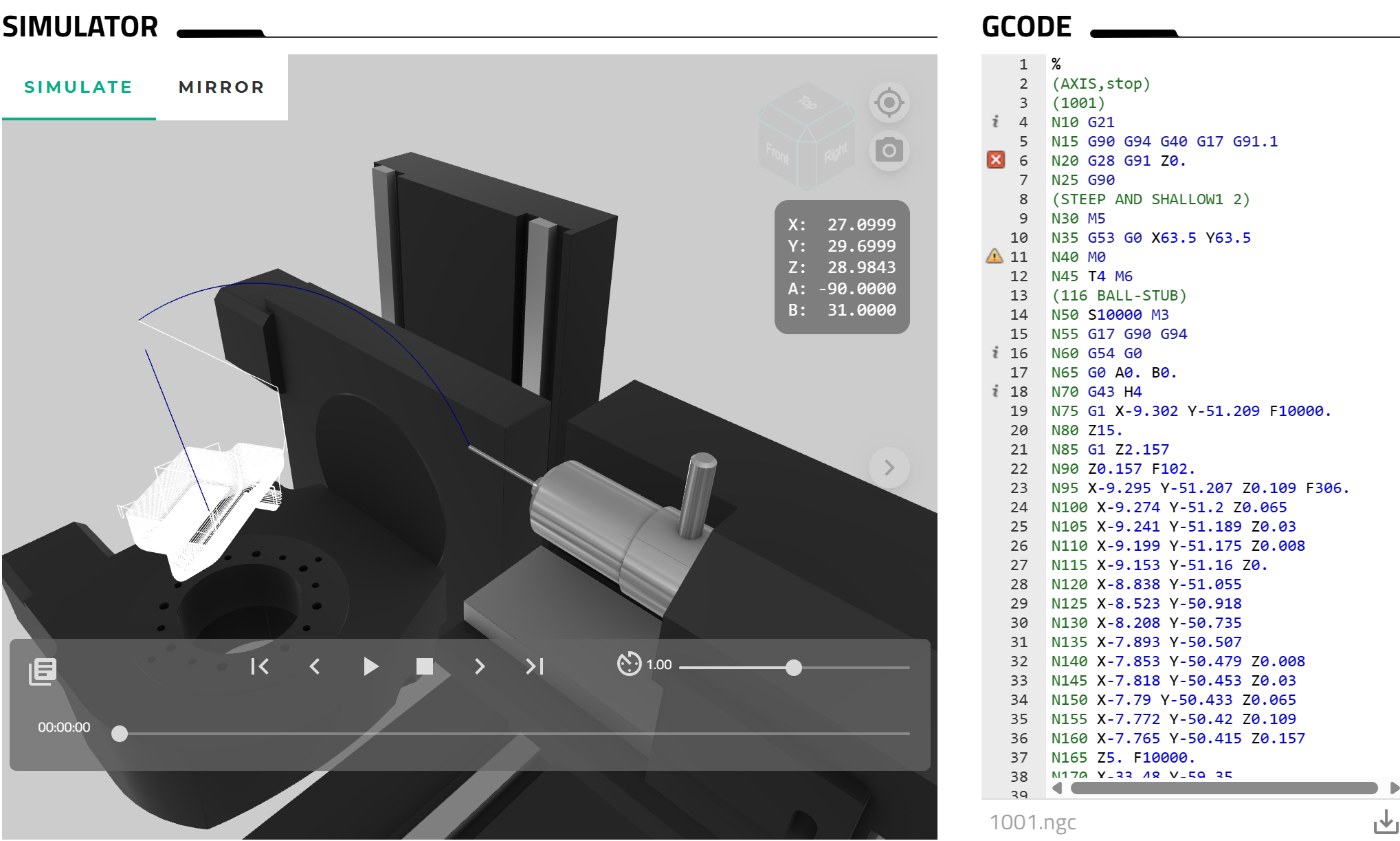
in kinematic control simulator
toolpath position is not related with work offset, moreover automatic avoidence add to code three extra commands:
N75 G6.2 X-42.791 Y-52.651 Z15. I1 J1 K0 P1
N80 G6.2 X-42.791 Y-52.651 Z15. I0 J0 K1 P1
N85 M428
which cause abnornal A axis rotation at the beggining, collisions and tool movement z-axis also differs in comparison to fusion simulation
Sorry but I am a begginer and I don’t understand why I can’t use A and B work offsets when it worked correctly for adaptive clearing. Do you also mean that in Fusion
If A was commanded to 0 for the adaptive clearing then it didn’t do any transformations and it would behave as you expected. Unfortunately, the math doesn’t work out when using RWO and TCPC with work offsets to use A work offsets once you start changing the orientation of the part.
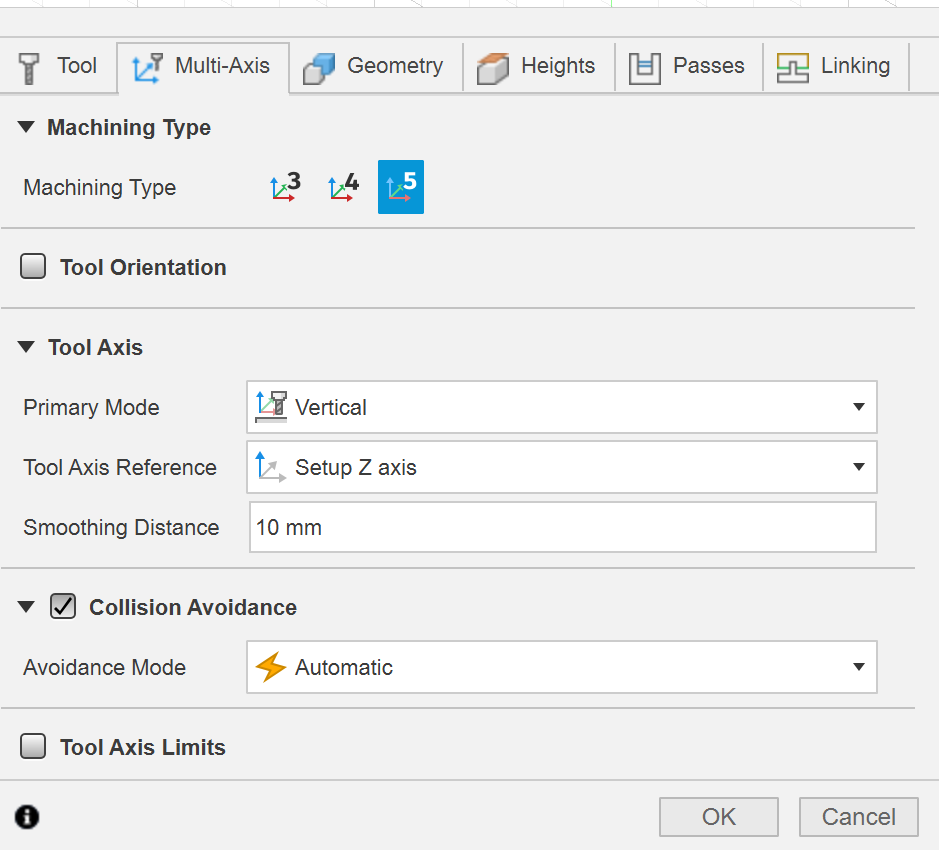
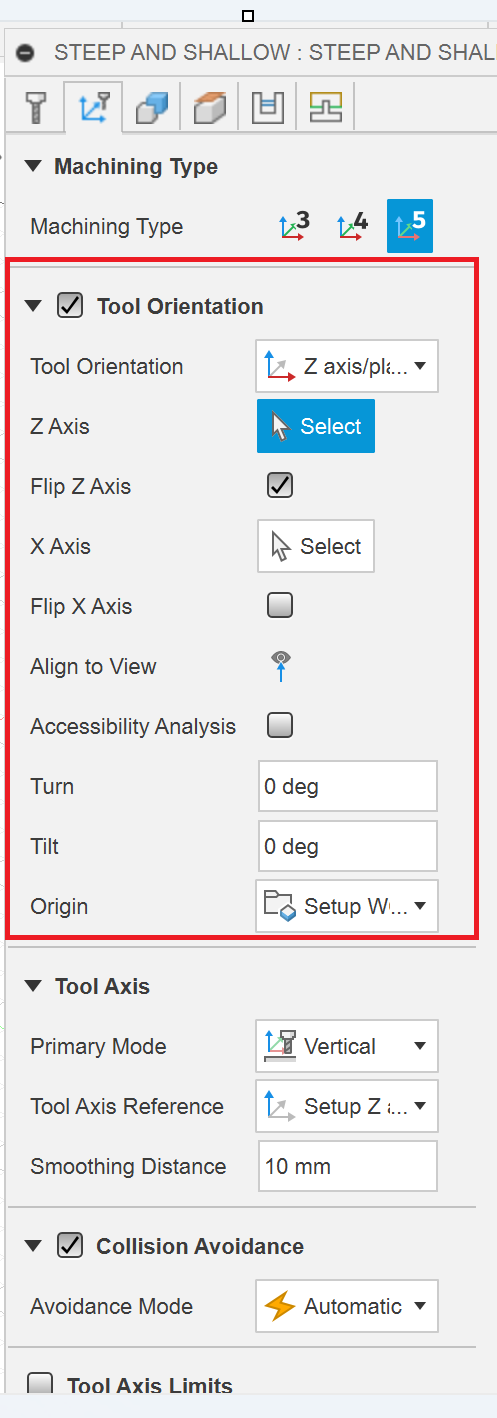
As I understood to achive my goal, I have to setup work offset in kinetic control when A and B is zero, than setup WCS in Fusion for this position, and if I want to begin machinnig when A is 90 i should change tool orientation directly in operation definition here: